Could Machines Become Native Actors in Web3?


But the physical world remains largely off-chain.
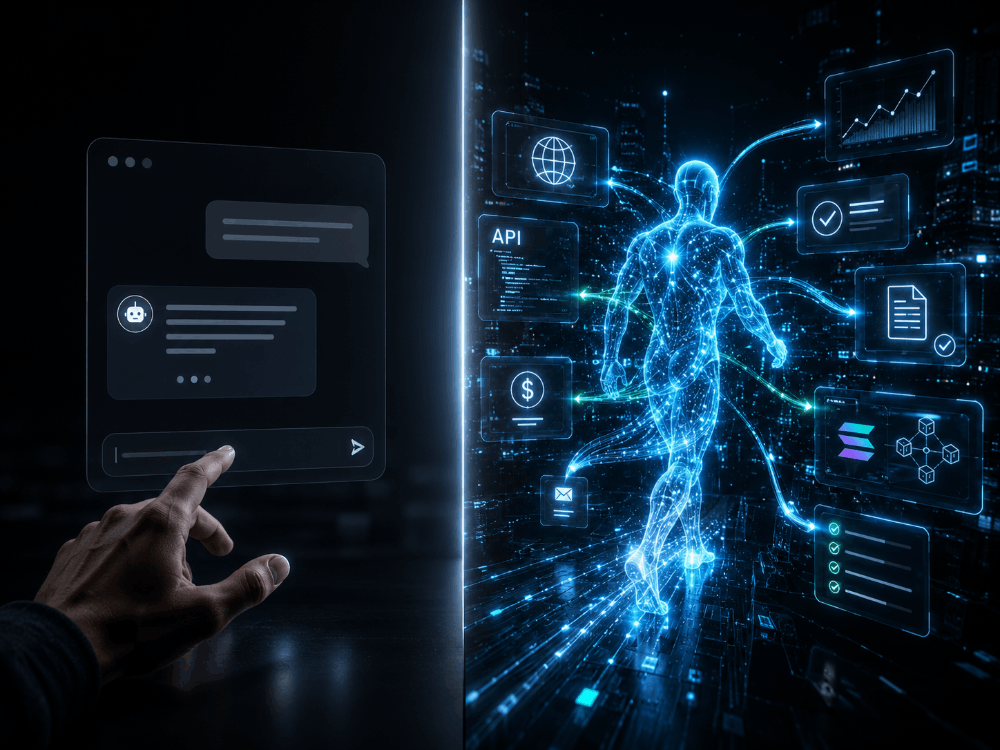
Robotics sits at that boundary. Machines sense, decide, and act in the real world. If Web3’s long-term promise is to coordinate value, labor, and ownership without centralized intermediaries, then the absence of autonomous physical agents is a structural gap.
The question is not whether robotics is “trendy.”
The question is whether Web3 can remain complete infrastructure without native ways to coordinate machines.
That’s why robotics is increasingly being discussed not as an application layer but as a potential core primitive.
➨ Own or control wallets
➨ Interact with smart contracts
➨ Receive, distribute, or earn value
➨ Prove actions performed in the
physical world
➨ Operate under on-chain rules rather than centralized command servers
A clear example include IoT devices that can independently participate in on-chain systems.
→ Physical Action Layer: A robot performs a task: move an item, capture data, deliver goods, provide a service.
→ Sensing & Verification Layer: Sensors, computer vision, GPS, or external attestations capture evidence of what happened.
→ Oracle & Proof Layer: This evidence is translated into verifiable claims using oracles, cryptographic proofs, or trusted execution environments.
→ On-Chain Logic Layer: Smart contracts validate conditions and trigger outcomes: payments, penalties, access rights, or reputation updates.
→ Economic Feedback Loop: The robot (or its operator) earns fees, stakes collateral, or participates in incentive mechanisms.
The key shift: machines are no longer passive endpoints.
They become first-class participants in decentralized systems.
➙ Autonomous Identity: Robots need persistent, verifiable identities tied to hardware, not humans. This intersects with decentralized identity (DID) and device-bound keys.
➙ Wallet-Controlled Execution: Machines require wallets that can sign transactions securely, often using hardware-backed key storage or trusted execution environments.
➙ Oracles and Proofs of Action: Bridging physical reality to on-chain logic remains the hardest problem. This includes sensor validation, redundancy, and fraud resistance.
➙ Real-Time Constraints: Robots operate in real time. Block times, finality, and latency matter more here than in purely financial use cases.
➙ Tokenized Incentives: Tokens are not speculation tools here, they are coordination tools that price labor, reliability, uptime, and risk.
• Decentralized physical infrastructure networks (DePIN) coordinating devices, sensors, and machines through tokens
• Autonomous delivery and mobility pilots experimenting with on-chain payments and access control
• Robotic data marketplaces where machines sell sensor data directly without centralized brokers
• DAO-governed hardware networks where participants fund, deploy, and maintain robotic fleets
These systems are imperfect, but they demonstrate feasibility not just ideas.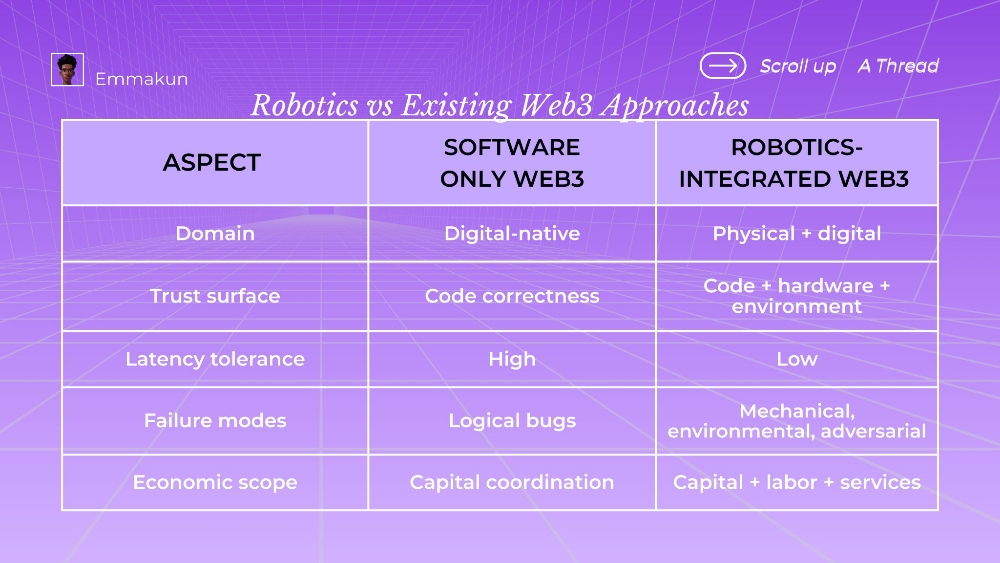

➠DePIN narratives shifting from sensors to actuators
➠Growing interest in machine-owned wallets and agentic systems
➠Increased focus on proof-of-physical-action mechanisms
➠Hardware becoming cheaper while coordination costs remain high
➠Investors exploring infrastructure rather than consumer robotics
Importantly, this is happening quietly mostly at the infrastructure and research level.
↬Labor markets expand to include non-human workers
↬Ownership models shift toward fractional or DAO-owned hardware
↬Regulation faces new questions about liability and accountability
↬Automation becomes permissionless rather than platform-controlled
↬Web3 identity evolves beyond human-centric design
➠ Hardware is expensive and fragile
➠ Physical-world verification is adversarial
➠ Latency and reliability remain unsolved at scale
➠ Regulatory frameworks lag behind technical reality
➠ Many incentives break when machines fail unp redictably
❍ Web3 offers tools uniquely suited to decentralized machine ownership and control
❍ The real value lies in machines as autonomous economic agents
❍ DePIN is a stepping stone, not the end state
❍ Builders should think in terms of primitives, not products
If Web3 succeeds in integrating robotics, it won’t feel dramatic, it will feel inevitable
If this helped frame robotics differently for you, your engagement is appreciated, so others can learn as well.